

Project Overview
Walking Oligomeric Robotic Mobility System (WORMS) refers to an architecture where a robotic mobility capability to access extreme lunar terrain emerges from the swarm-like integration of a small (‘oligomeric’) set of nearly-identical, articulating ‘worms’. Mimicking arms, legs and backbones, WORMS can be configured into diverse walking robots with payload capacity from kilograms to tons. Together with a small set of simple Accessories, such as different types of shoes or pallets / chassis, the architecture can be assembled into larger robot configurations tailored to the needs of various extreme terrain access missions. Each Worm or Accessory can optionally be enhanced with added functionality defined by interchangeable Species Modules. These could include a LIDAR unit, an anchoring drill, a winch, an additional battery and many more tools or sensors. The key idea is that all elements of WORMS can be easily reconfigured in the field by non-specialists to accomplish a large variety of mobility missions, including but not limited to extreme terrain access, provided only that the required elements are on hand at Artemis Base Camp and that the software has already been developed for a given configuration. WORMS was conceived in 2022 as an answer to NASA's Breakthrough, Innovative, and Game-changing (BIG) Idea Challenge - an annual competition for unviersity students to design, develop, and demonstrate a game-changing idea. In 2022, NASA challenged students to develop robotic systems that can move across extreme terrain, without the use of wheels.
(3 minute Jan 2022 proposal video and 4 min Oct 2022 development video [below], explaining the concept)
WORMS System Architecture
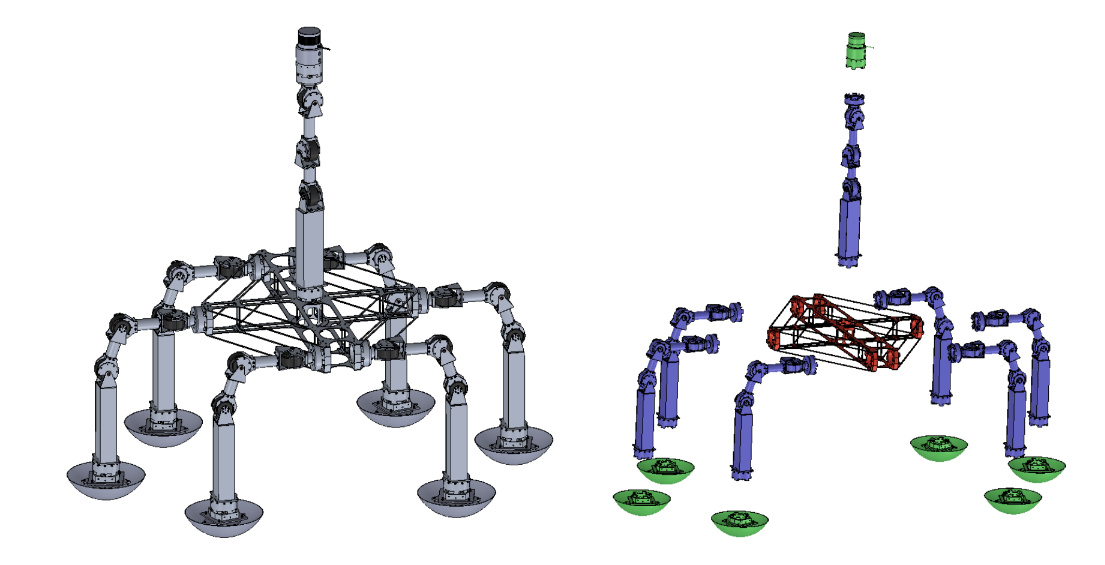
Taking our inspiration from LEGO and also from diverse animals such as spiders, goats, oxen and penguins, we designed a modular mobility system that would support the field attachment of WORMS mobility elements to large infrastructural modules as well as field reconfiguration of the worm-like modular elements from one animal-like robot to another.
Alongside Worms, the second essential set of architectural elements is Accessories. Accessories are simple capability-enabling forms and include Pallets, Containers, Spools and Shoes. Accessories enable specialized value-adding general physical capabilities such as carrying a payload, deploying a cable or improving the ability to walk (or wade through) certain types of terrain - think snow shoes and crampons. Most accessories also enable electrical power sharing between worms connected to it.
Critical innovations include the Universal Interface Block (UIB) which permits rigid coupling and electrical power transfer between architecture elements, and the Species Modules which confer special skills to individual worms, enabling the emergence of higher level functions through the synergistic, symbiotic collaboration of different worm species within a multi-worm robot configuration.


Project Vision & Applications
Each new robot configuration requires only new software plus a small number of worms of the appropriate species and accessories. The required worms and accessories for a robot configuration may be supplied new and assembled by a non-specialist in the field (think IKEA flat-pack robots), or may be repurposed by taking apart existing, no-longer-needed robot configurations. As long as the software exists in the code library and the necessary worms and accessories are at hand, any library robot configuration can be assembled by a non-specialist in a matter of hours or minutes and assigned to its task. The oligomeric (few parts) aspect of the architecture means that if a robot suffers damage, the damaged worm or accessory can be easily swapped out in the field with a replacement part so that the robot can continue its mission with minimal disruption. The architecture is designed to be resilient, versatile, easily maintainable, low-cost, evolvable, versatile, flexible and future-proof.
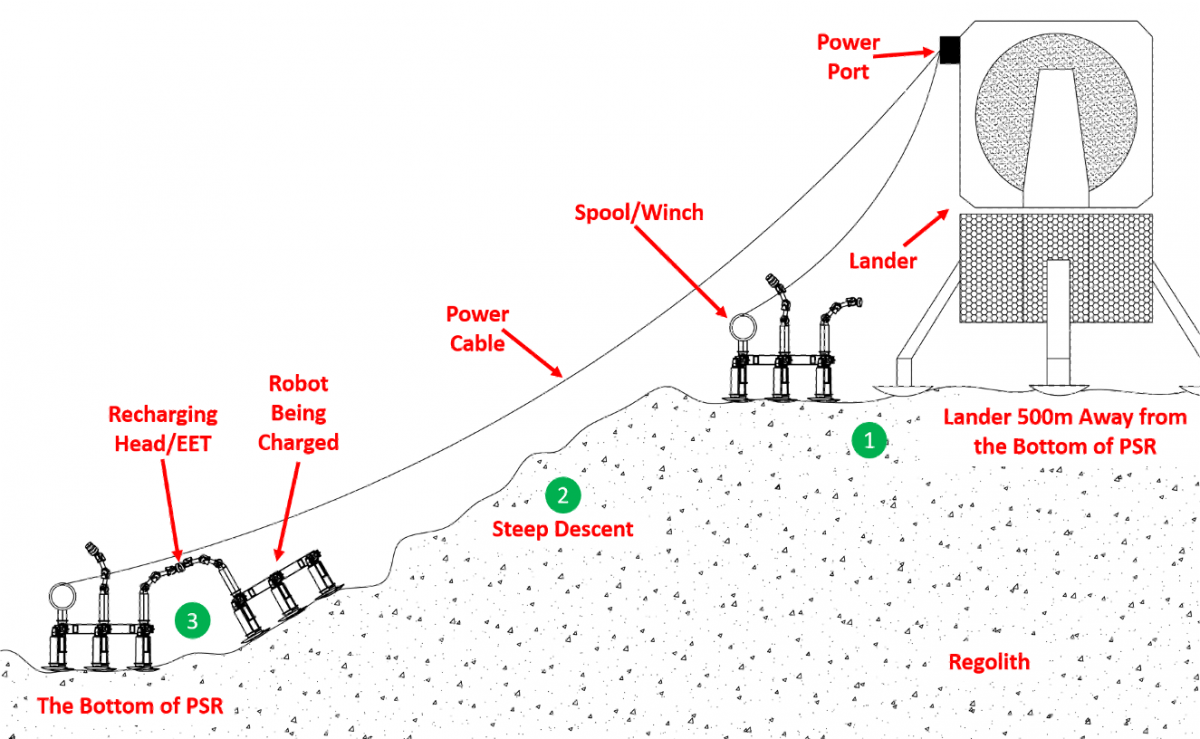
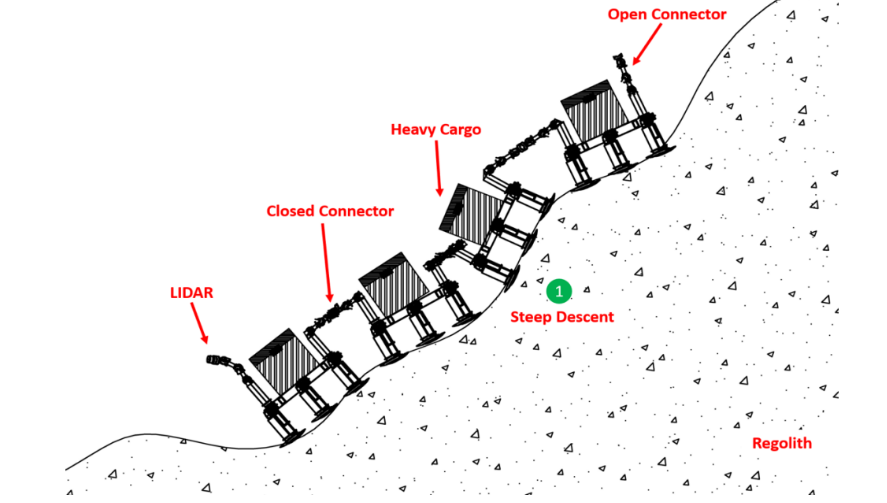
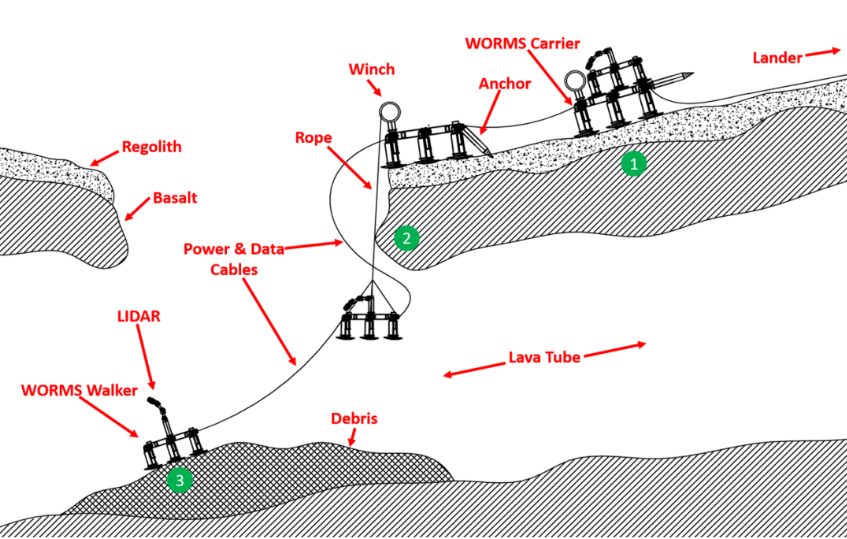
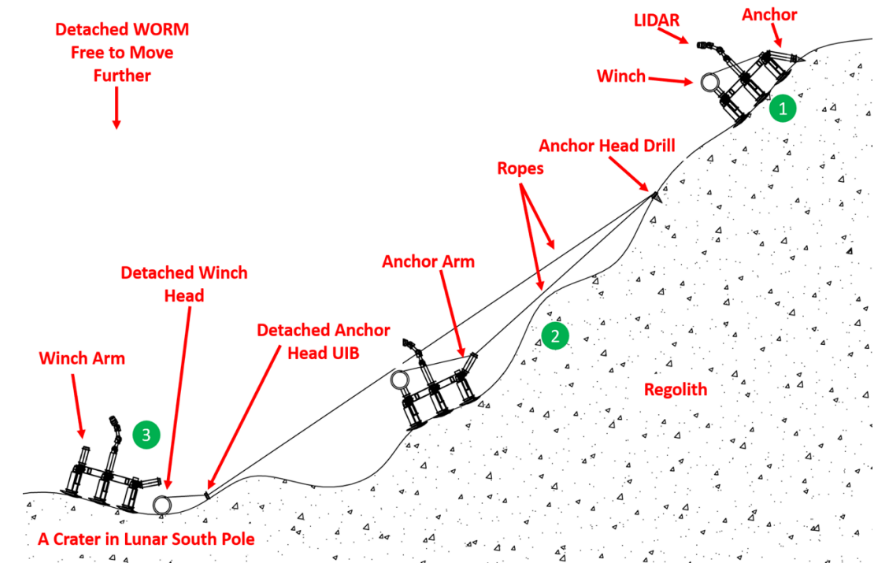
For the first demonstration of this technology in 2026, a quadruped WORMS-1 robot consisting of seven worm modules, a pallet and a spooled power cable, equipped with doppler LIDAR and a charging point, is proposed to be delivered by a Commercial Lunar Payload Services (CLPS) lander within a few hundred meters of the rim of a permanently shadowed region (PSR) near the lunar south pole. The other robots and rovers sharing this CLPS flight will also explore the same PSR. WORMS-1 forges ahead as a pathfinder through ‘fluffy’ and steeply inclined terrain to produce a 3D LIDAR point-cloud map of the immediate vicinity, facilitating path planning for the other rovers. Along the way, it deploys a power and data cable. At the end of its journey, WORMS-1 transforms itself into a recharging and data relay service station for the other robots and rovers exploring this PSR. Along with this mission, WORMS is also designed to accomplish a varierty of other missions as the technolgy evolves into it's 2nd and 3rd generations. Mulitple different mission concept of operations are displayed below.
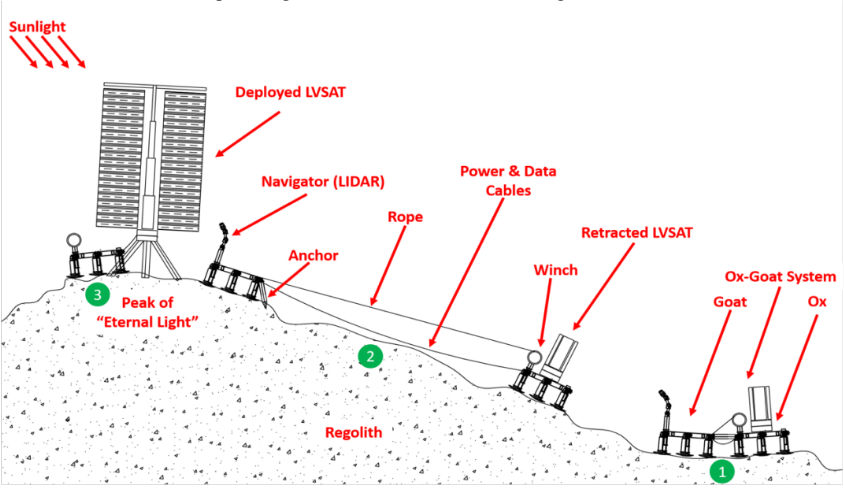
Beyond the immediate application to the demonstration use case, this architecture feeds forward into NASA’s Plan for Sustained Lunar Exploration and Development and into plans by commercial and international actors for a permanent presence near the lunar south pole. NASA and its commercial and international partners are likely to have substantial, evolving, diverse and growing needs for infrastructure development and robotic mobility support on the surface of the Moon for years to come. Accordingly, the WORMS architecture aims to deliver both present and future value. Our strategy is that WORMS should be a mass-producible, reconfigurable, reusable and scalable system, so that it can be potentially of value to most future extreme terrain access and lunar infrastructure development scenarios that can be envisaged.
Accomplishments / Next Steps
WORMS received the Best Technical Paper Award at NASA’s BIG Idea Challenge 2022 Forum and the M. Charles Fogg Best Conference Paper award at the 2023 IEEE Aerospace Conference. Paper can be found here.The project has also been highlighted in academia and industry through an additional publication and presention at the 2023 ASCEND conference. The project was also invited to deliver a lightning talk and poster presentation at the Lunar Surface Innovation Consortium (LSIC) 2023 Spring Meeting. In addition to these acheivements, the project was also accepted as a finalist in MassRobotic's Form and Function Challenge where the objective was to integrate products from various company sponsors such as Lattice and Danfoss into a new or existing robotics platform. After incorporating components from Lattice, FESTO, Novanta, Danfoss, and Analog Devices, the team secured 2nd place overall which came with a $5,000 reward. The team's software work has also won them the title of "Honorable Mention" in MassRobotics/AMD's Robotics Innovation Challenge, winning a full AMD computing system, a $1000 cash prize, and startup mentorship / collaboration opportunities.
Moving forward, the group is working towards advancing not only the mechanical, but autonomy capabilites of the architecture in preperation of new challenges and NASA / Industry collaborations. In conjuction with Lunar Outpost, the WORMS project has submitted a proposal for the Lunar Surface Technolgy Research (LuSTR) Oppurtunities Program to work on the "Lunar Crawlers" project: A Collaborative Locomotion System for Extreme Lunar Terrain Access. It leverages the WORMS architecture in order to enhance the capability of the Lunar Outpost ”HOUND” rovers through physical and software interfaces. In addition to this, the autonomy team is developing a novel modeling and simulation environment to support future work relating to the design and operation of modular robotic systems.
(If you are interested in joining the group or learning more about the project, please reach out to George, and Jacob [emails below] )
Project Leadership
Jeffrey A. Hoffman
Professor of the Practice of Aeronautics and Astronautics at MIT